Robot si ispirano ai gechi per gli atterraggi più ostili

Sono già numerosi i settori e le applicazioni in cui i robot agili e che volano stanno già svolgendo un ruolo importante. Tra questi la raccolta dati, la ricerca e il salvataggio, la sorveglianza delle colture e la gestione degli incendi boschivi. Tuttavia, anche i droni all’avanguardia hanno una capacità limitata di atterrare su terreni incerti e difficili, come il lato di un edificio, un albero o un palo.
L’atterraggio rapido su superfici verticali è una delle maggiori sfide della robotica aerea. Emulare questa manovra amplierebbe il loro spazio di applicazione, come in un campo di macerie post-terremoto, o per assistere i vigili del fuoco, tra gli altri scenari di ricerca e soccorso.
Ardian Jusufi, Max Planck Group Leader presso l’MPI for Intelligent Systems e Swiss Federal Labs for Materials Science Technology
Come afferma Jusufi, i robot attuali si affidano a rotori o alettoni per rallentare e riorientarsi prima dell’atterraggio.
L’atterraggio su un muro richiede l’integrazione di più sensori per controllare le forze aerodinamiche per portare il robot nell’orientamento del corpo inclinato desiderato. Il processo di integrazione di più sensori è computazionalmente costoso e porta a tempi di reazione lenti se paragonati alla dinamica dei disturbi ambientali.
Ardian Jusufi
Fu durante una gita nelle foreste pluviali di Singapore che Jusufi si imbatté nel geco asiatico dalla coda piatta, famoso non solo per le sue impareggiabili capacità di arrampicata, ma anche per la sua capacità di scivolare tra gli alberi e atterrare su superfici verticali. Questa lucertola fa affidamento sul suo busto e sulla coda per dissipare l’energia cinetica accumulata durante la planata; attaccando quindi la zona di atterraggio, premendo la coda contro il tronco, riesce ad impedire una caduta a capofitto.
Sono stato sorpreso di osservare che queste lucertole si schiantano a capofitto contro il tronco dell’albero e si inclinano all’indietro per atterrare. Si scontrano con l’albero a velocità sbalorditive di 22 km/h. Ho visto il potenziale di questo meccanismo nella creazione di robot multimodali in grado di appollaiarsi in ambienti simili.
Ardian Jusufi
Una risposta anticaduta come quella dei gechi
Nello studio pubblicato su Advanced Intelligent Systems, Jusufi e il suo gruppo hanno quindi sviluppato un prototipo dal corpo morbido basato su dimensioni, forma e peso del geco. Il prototipo utilizza quella che viene definita una risposta anticaduta. Come con il geco, la coda del robot era fondamentale per consentire un atterraggio sicuro, insieme alla rigidità del busto.
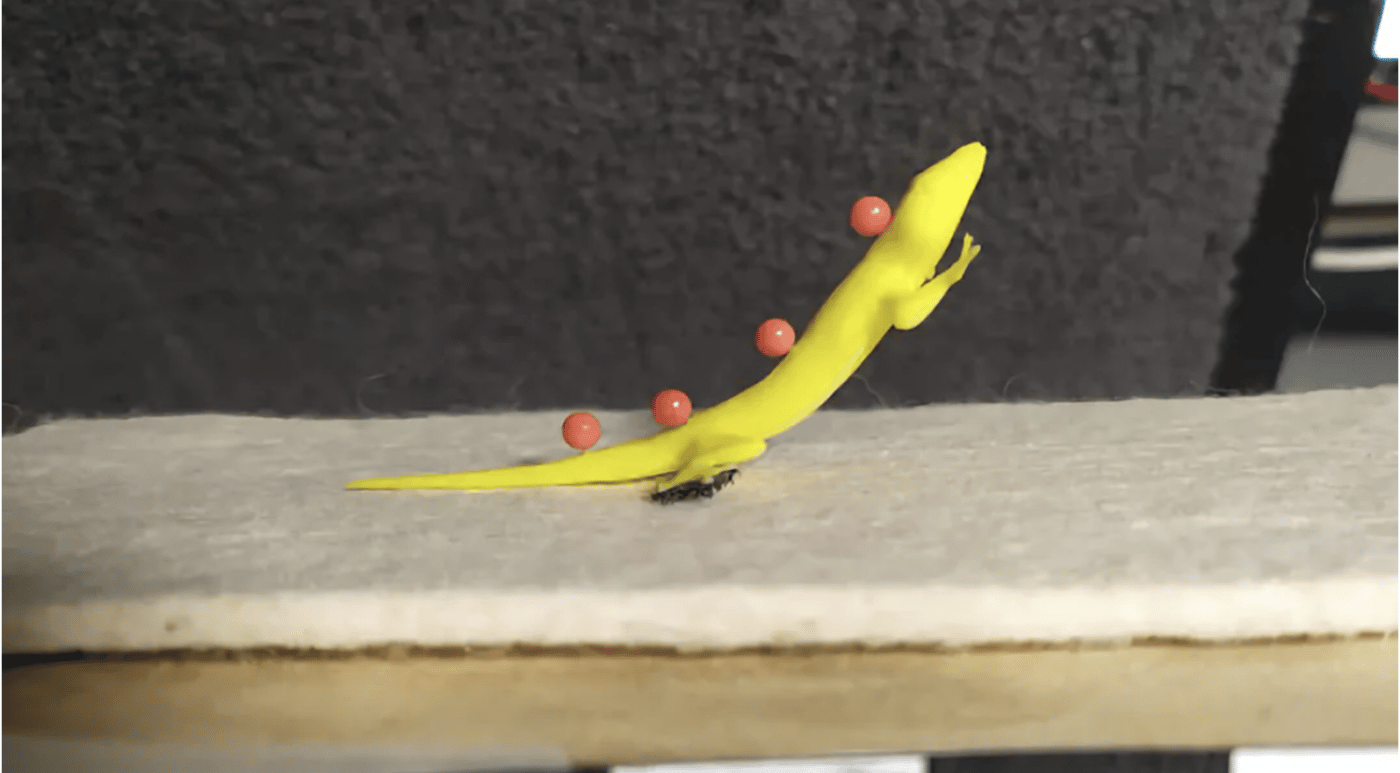
Un busto conforme consente al robot di dissipare quantità significative di energia cinetica all’impatto. Dopo l’impatto, il busto piegato consente agli arti posteriori del robot di impegnarsi con la superficie e la coda rigida riduce il rimbalzo.
Chellapurath, l’autore principale di questo studio
Quando la coda viene premuta contro il muro, fornisce una controcoppia e impedisce al robot di ruotare prima la testa e cadere a capofitto. “In questo spirito, le strutture di morphing e l’irrigidimento adattivo consentono sempre più una deambulazione robotica senza precedenti e con un controllo semplificato”, ha affermato Jusufi.
Sorprendentemente, affinché l’atterraggio di emergenza funzionasse correttamente, il team ha stabilito la necessità di una coda a tutta lunghezza: una mezza coda non sarebbe adatta.
Questo è particolarmente interessante perché supporta l’idea che queste lucertole si siano potenzialmente evolute per avere code della lunghezza appropriata per la capacità di locomozione del loro corpo.
Pranav Khandelwal, uno degli autori dello studio
I risultati sullo studio degli atterraggi dei robot bioispirati
Gli scienziati hanno anche testato diversi angoli di avvicinamento e velocità di impatto al fine di simulare scenari del mondo reale. La risposta anticaduta ha funzionato bene anche quando l’angolo e la velocità di avvicinamento sono cambiati, dimostrando la versatilità di questo meccanismo.
La risposta anticaduta dei gechi che si schiantano su un muro evidenzia l’importanza della conformità nelle strutture della schiena e della coda per garantire robustezza all’incertezza in un terreno naturale non strutturato. Più in generale, il lavoro di Jusufi e del suo laboratorio mette in evidenza l’utilità dell’utilizzo di robot bioispirati per esplorare le questioni della biologia.
Robert Wood, professore all’Università di Harvard
Questo studio fornisce nuove informazioni sui requisiti degli atterraggi “duri” e su come utilizzarli per aumentare la stabilità e semplificare l’atterraggio controllato nei veicoli aerei.
Il gruppo Max Planck ritiene che vi sia il potenziale per espandere la robustezza dell’atterraggio mediante un’ulteriore messa a punto delle proprietà del materiale del robot e testandolo su una varietà di superfici difficili in ambienti diversi per potenziare le capacità del robot.